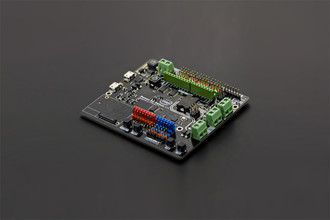
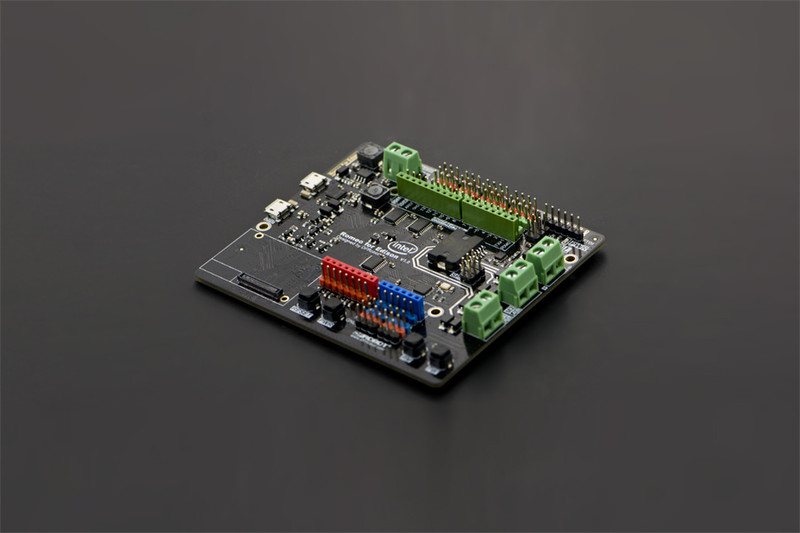



DFRobot Romeo for Intel Edison Controller (Without Intel Edison)
MPN: DFR0331
Verkauf und Lieferung durch:

Wo kaufen und Preise (Werbung *)
nach Oben

|
|
в наличии
|
* Alle Preise inkl. der jeweils geltenden gesetzlichen Mehrwertsteuer, ggfs. zzgl. Versandkosten. Alle Angaben ohne Gewähr. Preisänderungen sind in der Zwischenzeit möglich.
Technische Daten
nach Oben
-
Zahlungsarten
Wir akzeptieren: